::產品概述::
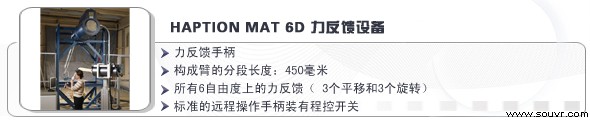
HAPTION MAT 6D 力反饋設備
MAT 6D為新一代的力反饋遙操作主臂
其簡單的串行架構與遠程驅動提供了輕質��、修長的設計�,特別適合經驗豐富的操作人員的習慣。

MAT 6D (Telerobotics主臂)為一款6自由度觸覺裝置或“主臂”�,配備一個力反饋手柄。專為在惡劣環境下的機械臂遠程操作而設計����。
借助其嵌入式直角力控制和奇點的存在,該設備能夠用于特種從動臂運動學當中�。操作者憑借力反饋技術可準確控制遠程操縱器施加的力,從而降低了工具損壞和環境破壞的風險����。
Mat 6D可極其輕松地集成在一個虛擬現實環境中,便于進行操作者訓練和任務規劃����。

技術特點
MAT 6D是當下市場中唯一的一款力反饋系統����,提供如下特點:
? 所有6自由度上的力反饋( 3個平移和3個旋轉)
? 力反饋手柄
? 操作工作空間對應于一個人體手臂的動作
? 構成臂的分段長度:450毫米
? 最大力度為35N(確保 40厘米大小的一個立方體)
? 最大旋轉扭矩為3Nm(確保 40厘米大小的一個立方體)
? 標準的遠程操作手柄裝有程控開關
? 高度可靠的動力傳輸系統(滾珠螺桿)
? 機械支持高度可調(可選液壓助力)
? 重量僅34公斤�,可不使用特定設備實現運輸
? 主操作系統提供開發工具包(API)
? 證明與目前市場上的主流應用軟件的兼容性,使用專用插件:VortexTM��、HavokTM����、ODE、 VirtoolsTM��、CatiaTM V5����、OpenMask等。
? 兼容遠程操作軟件TAO2000 TM V2
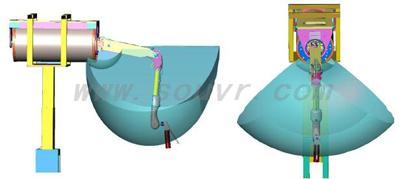
設備工作區
MAT 6D由兩個主要的鉸接段組成�,固定在一個旋轉底座上。第二段末端與一個鉸接腕相連�,可繞三個交叉軸轉動。由此�,觸覺接口是一個6自由度的移動設備,在所有方向上提供力反饋��。MAT 6D具有足夠大的工作區����,以包含一個40厘米大小的立方體。平移位置分辨率為0.02毫米��,旋轉弧度為1e- 4����。
詳細規范
| 軸nb | 間隙(°) | 連續扭矩 (N.m) | 最大扭矩 (N.m) | 最大力(N) |
| 1 | 69 | 29Nm | 90 Nm | 180 N |
| 2 | 73 | 22 Nm | 66 Nm | 132 N |
| 3 | 109 | 26 Nm | 78 Nm | 156 N |
| 4 | 326 | 4 Nm | 12 Nm | 24 N |
| 5 | 210 | 4 Nm | 12 Nm | 24 N |
| 6 | 510 | 4 Nm | 12 Nm | 24 N |
::產品規格::
| 規格 | HAPTION MAT 6D 力反饋設備 |
| 傳輸線的最大力: | 70 N |
傳輸線的連續力: | 30 N |
| 旋轉連續扭矩: | 4 N.m |
| 重量平衡: | 靜態部分(機械,彈簧) |
| 按鈕數目: | 6 個(1個離合器����, 5個特定應用) |
| 工具變換器: | 不提供 |
::應用范圍::
適用于虛擬現實、項目審查����、人機工程學分析、功能測試����、裝配/拆卸、工作環境仿真�、操作人員培訓、醫療培訓�、遠程外科手術等諸多領域
::技術特征::
?所有6自由度上的力反饋( 3個平移和3個旋轉)
?力反饋手柄
?操作工作空間對應于一個人體手臂的動作
?構成臂的分段長度:450毫米
?最大力度為35N(確保 40厘米大小的一個立方體)
?最大旋轉扭矩為3Nm(確保 40厘米大小的一個立方體)
?標準的遠程操作手柄裝有程控開關
?高度可靠的動力傳輸系統(滾珠螺桿)
?機械支持高度可調(可選液壓助力)
?重量僅34公斤����,可不使用特定設備實現運輸
?主操作系統提供開發工具包(API)
?證明與目前市場上的主流應用軟件的兼容性�,使用專用插件:VortexTM、HavokTM�、ODE、 VirtoolsTM��、CatiaTM V5�、OpenMask等。
?兼容遠程操作軟件TAO2000 TM V2
::下載資料::
HAPTION MAT 6D 力反饋設備中文版