::產品概述::

Movella的MTi(已停產,同類產品推薦:MTI 10慣性位置追蹤器�,MTI 100慣性位置追蹤器)是一款微型3自由度飛行姿態及航向參考系統,具有體積小�、重量輕的特點。該產品包含3D加速計���、陀螺儀、磁強計以及慣性測量裝置�。該產品的內置低功耗信號處理器可提供實時無位移3D方向、校準3D加速度����、3D轉彎速度以及3D地球磁場數據�。
?


MTi是一款優秀的測量裝置�,用于相機、機器人���、車輛和其它無人設備的安裝和控制���。

特點
- 實時計算姿態/航向和慣性動態數據
- 重力和地球磁場參照360度方向
- 集成3D陀螺儀、加速計和磁強計
- 機載DSP和實時傳感融合算法
- 陀螺儀可實現高頻定位跟蹤
- 更新率高(120赫茲)����,最高512赫茲慣性數據
- 對溫度、3D偏離和傳感器交叉敏感進行獨立校準
- 接收并生成同步脈沖
典型的野外使用
?
超高性能
MTi采用陀螺儀�、加速計和磁強計來確定方向。Xsens先進的傳感器融合算法可應對暫時磁干擾和短期加速�,從而可以計算出實時方向數據。此外���,MTi軟件開發工具包還含有磁場映射程序�,可以糾正硬/軟鐵影響�。
?
| 傳感器性能 |
| ? | 轉彎速度 | 加速度 | 磁場 |
| 尺寸: | 3軸 | 3軸 | 3軸 |
| 全量表(標準): | ±300度/秒 | ± 50米/秒2 | ± 750 mGauss |
| 線性度: | 0.1% FS | 0.2% FS | 0.2% FS |
| 偏置穩定性: | 1度/秒 | 0.02米/秒2 | 0.1 mGauss |
| 比例因子穩定性: | - | 0.03% | 0.5% |
| 噪音: | 0.05度/秒/√Hz | 0.002米/秒2 /√Hz | 0.5 mGauss |
| 對準誤差: | 0.1度 | 0.1度 | 0.1度 |
| 帶寬: | 40赫茲 | 30赫茲 | 10赫茲 |
最大更新率: | 512赫茲 | 512赫茲 | 512赫茲 |
高精度專用設置
MTi的用途十分廣泛,內嵌傳感器融合濾波算法適應性極強���,適用于不同的應用領域���,并可確保較高精度����。公司已經對傳感器融合濾波設置進行了校準測試�,能夠符合不同的應用要求,也可以根據用戶的特殊要求進行專門設置�。按照應用要求正確設置可確保較高的設備性能,而且為用戶節省了調試時間����,同時避免了調試不準確的情況。
靈活性強
MTi可與軟硬件設備同步(包括SyncIn和SyncOut�,即,同步輸入和同步輸出)�。功能全面的軟件開發包可以對MTi進行全面控制,而且配有多種接口���,可連接直觀的Windows圖形界面軟件�、API二進制庫(Windows����、Linux系統)以及提供源代碼執行MTi二進制通信協議���,可與任何平臺集成使用�。MTi可以幫用戶快速解決問題。
輸出
方位性能
- 動態范圍:3D所有角度
- 角速率分辨率:0.05°
- 靜態精度:橫滾/俯仰<0.5°
- 靜態精度:航向<1°
- 動態精度:>2°RMS
設計精巧
- 外型設計小巧�,堅固耐用
- 便于在其他系統或應用中安裝使用
- 重量輕、超低功耗
一般應用領域
?
水下應用
- 自動潛水器/水下機器人/無人水下航行器的控制和穩定
- 超短基線定位系統的校正
MTi體積小巧���,能夠安裝在小型自動潛水器/水下機器人/無人水下航行器等設備中使用���,而且在方向、動態數據和抗磁干擾等方面的性能都十分突出�,是中小型潛水器的優質選擇。機載數字處理器可以輸出瞬時姿態控制的方向數據����。MTi還可作為穩定指南針使用,可通過軟硬件設備進行控制���。MTi的另一項用途是對超短基線定位系統進行校正�。直接低層次通信功能可實現全面簡單的控制����。
水上應用
- 各類船只和平臺的狀態評估
- 回聲測深儀和聲納裝置的定位校正
- 動態定位系統的傳感器輸入
- 浮標上傳感器系統的校正
MTi可用于包括小型調查船、大型集裝箱船在內等各種船只的狀態評估。該產品外形小巧�,可以安裝在回聲測深儀、聲納����、航行保護系統等小型設備中使用,能夠對測量信息進行實時存儲和顯示�。MTi尤其適合安裝在浮標上進行長期測量和監測。此外�,MTi還適用于海上及天氣動力學研究領域。
?
無人地面車輛和機器人
- 行駛及行走機器人的自主控制
- 無人地面車輛的控制和穩定
MTi可以幫助機器人實現精確駕駛和直接通信���。本產品具有體積小���、重量輕的優勢,可以輕松安裝在用戶需要的位置���。對于行走機器人����、人形機器人和兩足機器人來說����,MTi的快速響應特點更有利于對機器人進行平衡控制����。對于無人地面車輛����,用戶同樣可以使用MTi提供動態方向信息����,節省了成本。到目前為止�,由美國國防部高等研究計劃局(DARPA)舉辦的無人駕駛汽車挑戰賽中的許多參賽隊伍都采用了MTi系統。
?
其他用途
MTi的內部傳感器可為不同的車輛提供全立體動態數據(加速度和轉彎率)���。由于產品外形小巧���,可以安裝在小口徑管材中使用(40毫米以下)。如果配合里程計一起使用����,MTi可以輸出地下管線的完整圖像。MTi還可用于其它不同的應用環境����,包括相機穩定和天線定位等。
?
::應用范圍::
適用于虛擬現實、醫療���、運動�、 生物工程系統���、體育���、慣性導航系統、人體姿態測量�、仿真等諸多領域。
?
::技術特征::
- 360 度全方位輸出
- 長時間穩定性和快速動態響應相結合
- 輸出三軸加速度�、三軸角速度和三軸地磁場強度
- 全固態微型MEMS慣性器件
- 多種數字輸出模式
- 接收或者產生同步脈沖
- 集成溫度、3D安裝誤差以及傳感器交叉軸影響的補償
::產品規格::
?
| 規格 | Xsens MTI微型AHRS 慣性位置追蹤器 |
| 技術規范 |
| 姿態和航向 |
| 靜態精度(滾動/傾斜): | < 0.5度 |
| 靜態精度(前行)1: | <1度 |
| 動態精度2: | 2度 |
| 角分辨率3: | 0.05度 |
| 動態范圍 |
| 傾斜: | ±90度 |
| 滾動/前行: | ±180度 |
| 最大更新率 |
| 方向數據: | 256 Hz |
| 校準的傳感器數據: | 512 Hz |
| 接口 |
| 數字接口: | RS-232, RS-485[(max. 921k6 bps)和USB(ext轉換器)] |
| 工作電壓: | 4,5 - 30V |
| 功耗: | 350毫瓦 |
| 界面選項 i/o: | SyncOut, AnalogIn, SyncIn(取決于數字接口) |
| 最大操作范圍 |
| 環境溫度: | 操作范圍4-40.... +85oC |
| 指定性能: | 操作范圍40.... 55oC |
1在均勻磁場環境
2一個穩定的條件下Xsens傳感器融合算法
31σ標準偏差角隨機游走的零均值
4不結露環境 |
| 傳感器規范 |
| 傳感器性能 | 轉彎速度 | 加速度 | 磁場 |
| 尺寸 | 3軸 | 3軸 | 3軸 |
| 全量表(標準) | ±300度/秒2 | ± 50米/秒2 | ± 750 mGauss |
| 線性度 | 0.1% FS | 0.2% FS | 0.2% FS |
| 偏置穩定性5(1σ) | 1度/秒 | 0.02米/秒2 | 0.1 mGauss |
| 比例因子穩定性5(1σ) | ? | -0.03% | 0.5% |
| 噪音 | 0.05度/秒/√Hz | 0.002米/秒2/√Hz | 0.5mGauss(1σ) |
| 對準誤差 | 0.1度 | 0.1度 | 0.1度 |
| 帶寬 | 40赫茲 | 30赫茲 | 10赫茲 |
| 最大更新率 | 512赫茲 | 512赫茲 | 512赫茲 |
| 5偏差超過工作溫度范圍(1σ) |
| 硬件規格 |
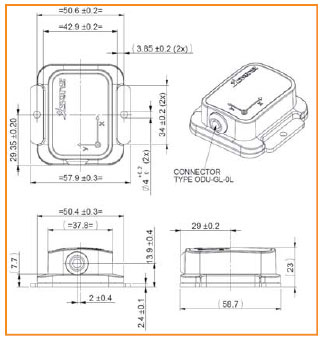
| 機殼 |
| 尺寸: | 58x58x22 mm (寬x長x高) |
| 重量: | 50克 |
| 選項 |
| 接口 | ## | 滿量程加速度 | A## | 滿刻度轉速 | G## | | RS-232 | 28 | 5g (50 m/s2) | A53 | 150 deg/s | G15 | | RS-485 | 48 | 18g (180 m/s2) | A83 | 300 deg/s | G35 | | RS-422 | 68 | ? | ? | 1200 deg/s | G25 |
|
| 產品編號: | MTi-## A## G## |
| 標準版本: | MTi-28 A53 G25 |
::下載資料::
MTi 慣性傳感器傳單介紹資料下載(中文)