::產品概述::
產品用途
一款小巧的商務研究工具�,可為用戶的產品和研究設備添加觸覺功能���。
產品簡介
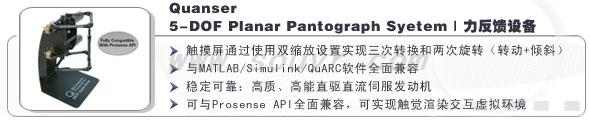
Quanser公司開發的5自由度“觸覺棒”是一款創新的觸覺設備���。該設備由英國哥倫比亞大學的緹姆?薩爾庫迪恩(Tim Salcudean)教授研制發明,起初用于觸覺技術的研究���,之后Quanser公司將冗余控制機器人的性能進一步提升�,并將其轉化為一款功能強大的商業化產品���。觸摸屏為5自由度設計���,通過使用雙縮放設置實現三次轉換和兩次旋轉(轉動+傾斜)。每個縮放儀由三臺DC發動機直接驅動�����,其中兩臺位于肩部,另一臺功率更強的直流發電機位于腰部�。控制棒的頂端受動器通過通用接口與每個縮放器的兩頭連接�����。

棒軸(5自由度)周圍的偏轉為被動式無限偏轉�����,使用者握把更為舒適���。該設備由輕質材料制成���,并在腰部連接有兩個助動器,從而進一步降低了棒體的重量���。
六臺發動機的電能通過Quanser的QPA線性功放器進行傳送,發動機軸的位置由高分辨率光學譯碼器進行測量�。該系統可與PC機相連,并使用Quanser的Q8高性能硬體回路控制面板進行控制�����。系統開放式結構設計允許用戶運行其希望運行的任何控制法則。兩個觸覺棒縮放儀由前后兩個Q8控制面板進行主/副驅動�����。
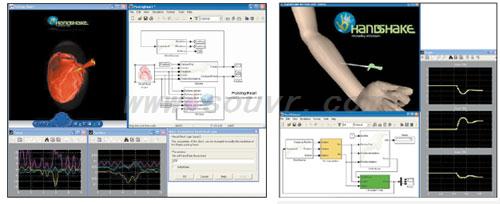
該產品配有Quanser公司靈活的QuARC軟件和應用樣本�,可通過MATLAB/Simulink對系統進行實時控制。Q8軟件工具包內配有驅動器���,用戶可以在自己特定的平臺上開發自己的控制器�。
使用虛擬現實工具盒創建觸覺應用���。
主要功能
優化的觸摸屏設計
- 與MATLAB/Simulink/QuARC軟件全面兼容
- 無異常操作
- 最大化力同向性:均勻力
- 可與使用者手掌完全貼合
穩定可靠
- 高質�、高能直驅直流伺服發動機
- 高分辨率正交光學譯碼器可探測系統位置
- 耐用���、科學的內部構造設計
- 緊急關閉安全開關
- 功放器過熱保護
功能全面
- 開放式架構系統���,全部備有證明文件
- 覆蓋多領域觸覺應用
兼容性能
- 可與Prosense API全面兼容,可實現觸覺渲染交互虛擬環境
- 可與MATLAB/Simulink/ WinCon軟件全面兼容
::應用范圍::
適用于觸覺技術研究���、商業化科研�、機器人技術和運動學等領域。
::技術特征::
- 與MATLAB/Simulink/QuARC軟件全面兼容
- 無異常操作
- 最大化力同向性:均勻力
- 可與使用者手掌完全貼合
- 高質�����、高能直驅直流伺服發動機
- 高分辨率正交光學譯碼器可探測系統位置
- 耐用���、科學的內部構造設計
- 緊急關閉安全開關
- 功放器過熱保護
- 開放式架構系統���,全部備有證明文件
- 覆蓋多領域觸覺應用
- 可與Prosense API全面兼容,可實現觸覺渲染交互虛擬環境
- 可與MATLAB/Simulink/ WinCon軟件全面兼容
::產品規格::
| 規格 | Quanser 5-DOF Planar Pantograph Syetem 力反饋裝置 |
| 發動機 | 最高功率: | 200瓦 |
| 扭距常值: | 0.11 N.m |
| 扭距峰值: | 0.37N.m |
| 扭距常數: | 0.0525 N.m/A |
| 線性功放器(各) | 功率: | 300瓦 |
| 電流常值: | 7安 |
| 電流峰值: | 10安 |
| 內置供電(各) | 電壓: | 30伏 直流 |
| 電源: | 600瓦 |
譯碼器(各) | 分辨率: | 20,000計數/轉速 |
| 幾何外形 | 前臂: | 195毫米 |
| 發動機臂: | 144毫米 |
| 頂端受力 –標稱位置: | Fx(N) / 峰值Fy (N) / 峰值Tz (N.mm) – 峰值7.7 / 7.0 / 9.0 |
| 力反饋工作區: | x(毫米)/y(毫米)/z(毫米)±240/85-335/-215-235 |
::下載資料::
中文版 5 DOF - Product Information Sheet